Challenges de robotique
année 2022 et 2023
 Le challenge annuel organisé en enseignement optionnel SI/CIT s'est déroulé fin mai pour récompenser le travail de toute une année des élèves ayant suivi cet enseignement avec leur professeur.
Le challenge annuel organisé en enseignement optionnel SI/CIT s'est déroulé fin mai pour récompenser le travail de toute une année des élèves ayant suivi cet enseignement avec leur professeur.
Le cahier des charges du challenge 2023 était de réaliser un robot à partir des indications suivantes :
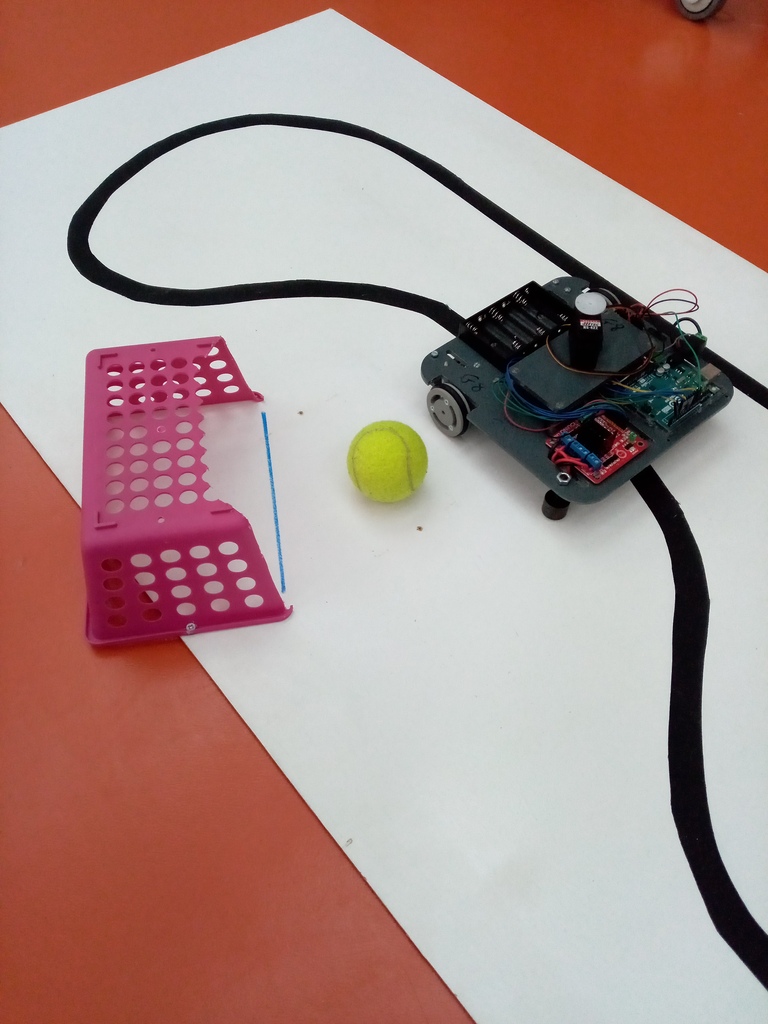
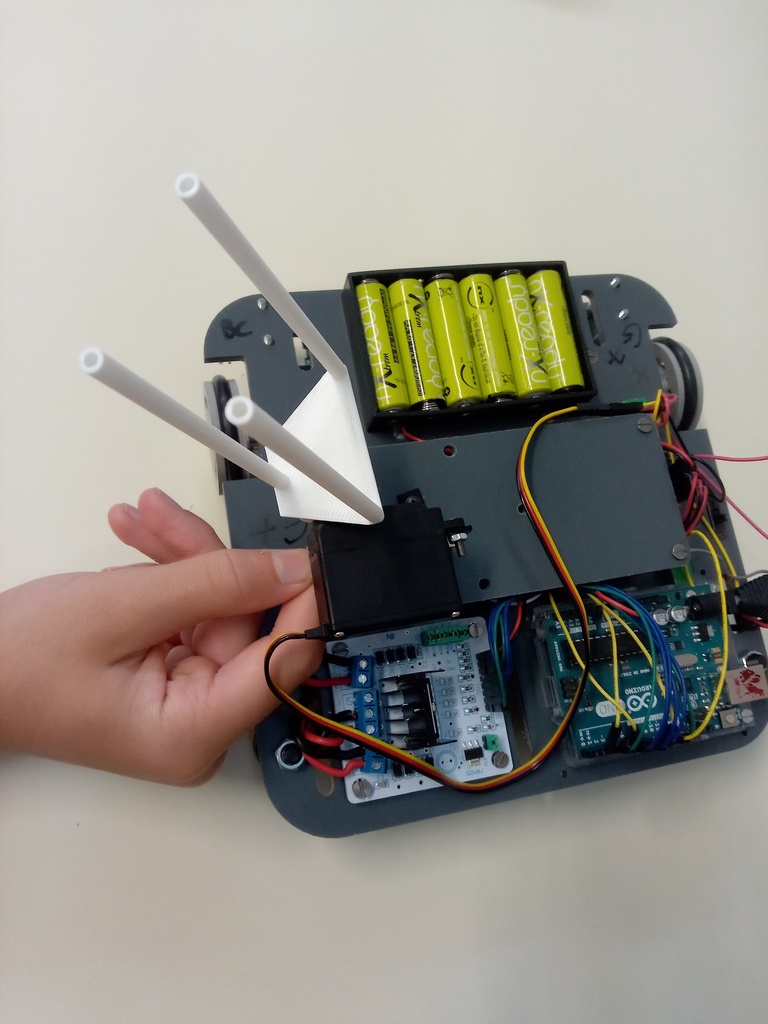
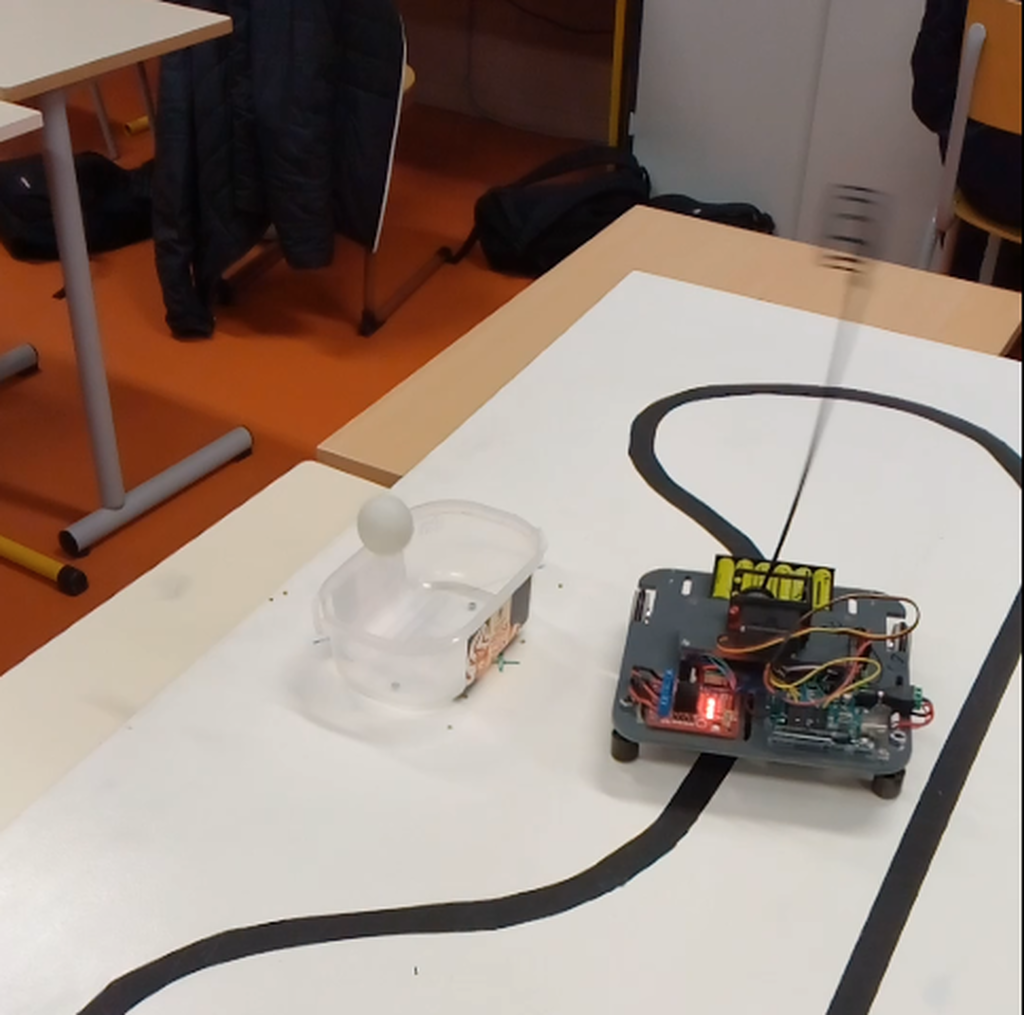
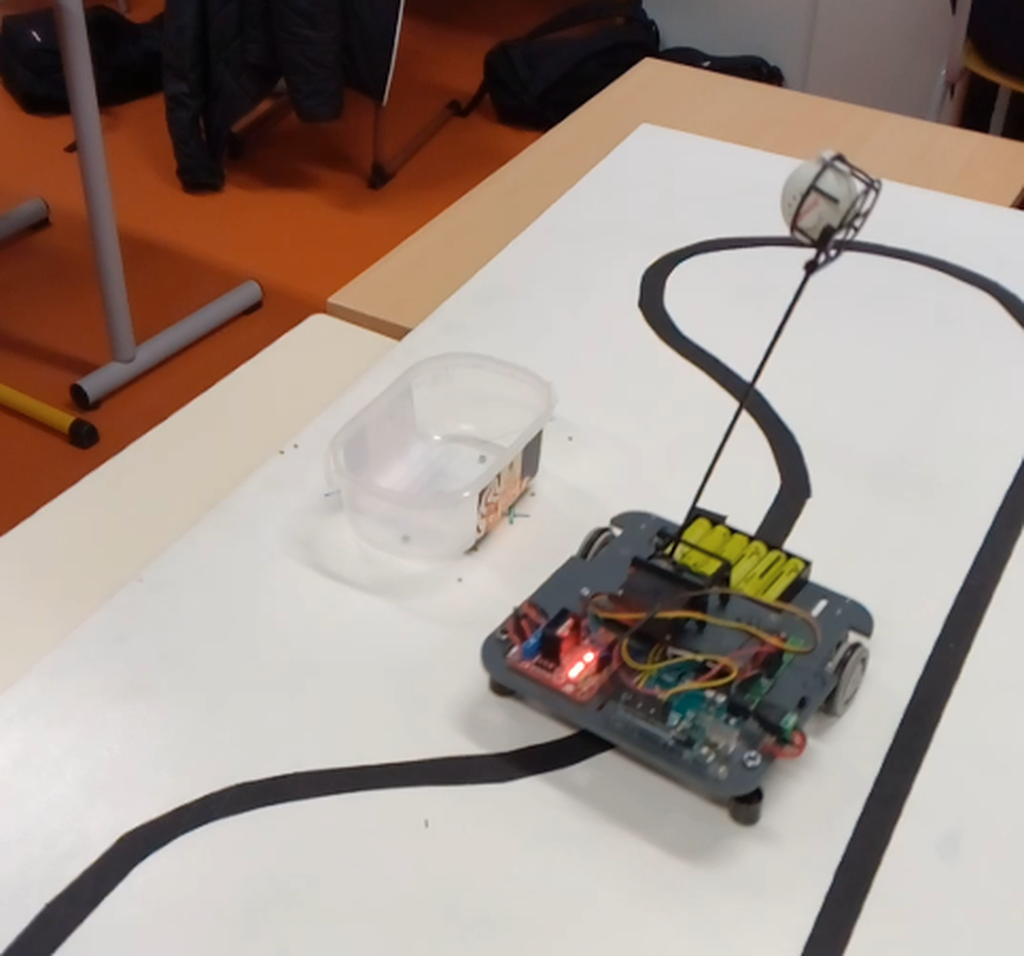
Emporter une balle de tennis de table sur un robot de taille maximale 200*200*200mm (sans balle).
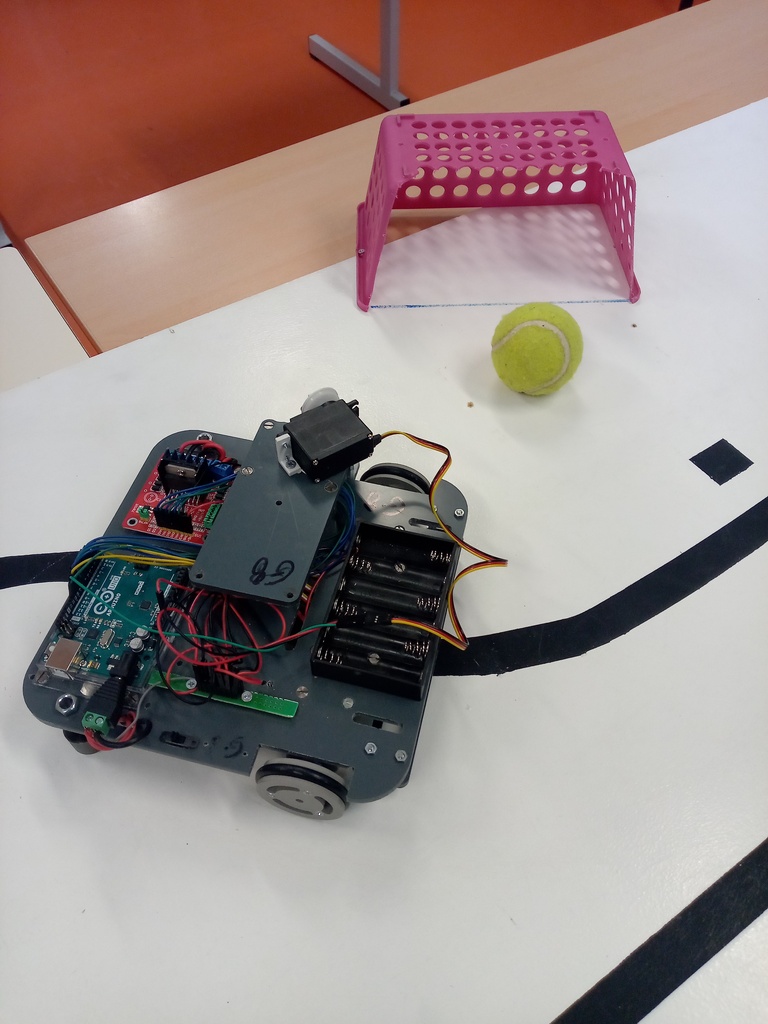
Être autonome en énergie et non radiocommandé. Suivre la ligne noire, s'arrêter devant un panier pour y déposer la balle, ou la lancer dedans. Continuer jusqu’à la zone d’arrivée.
Le parcours devra être réalisé 3 fois sans recharger.
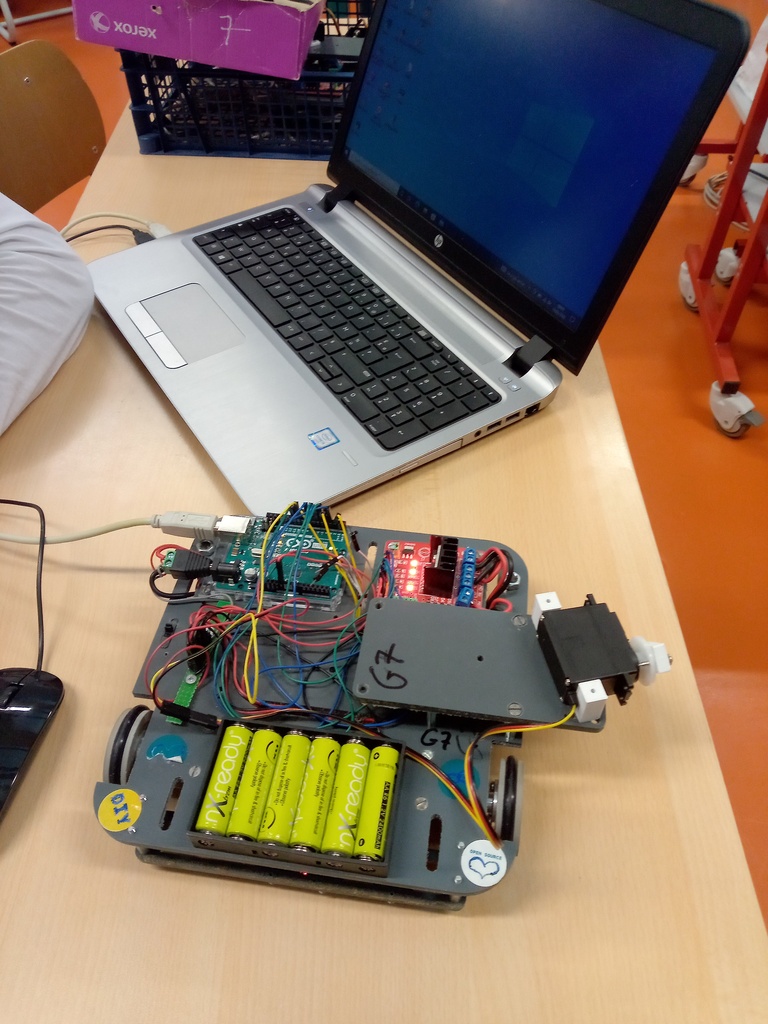
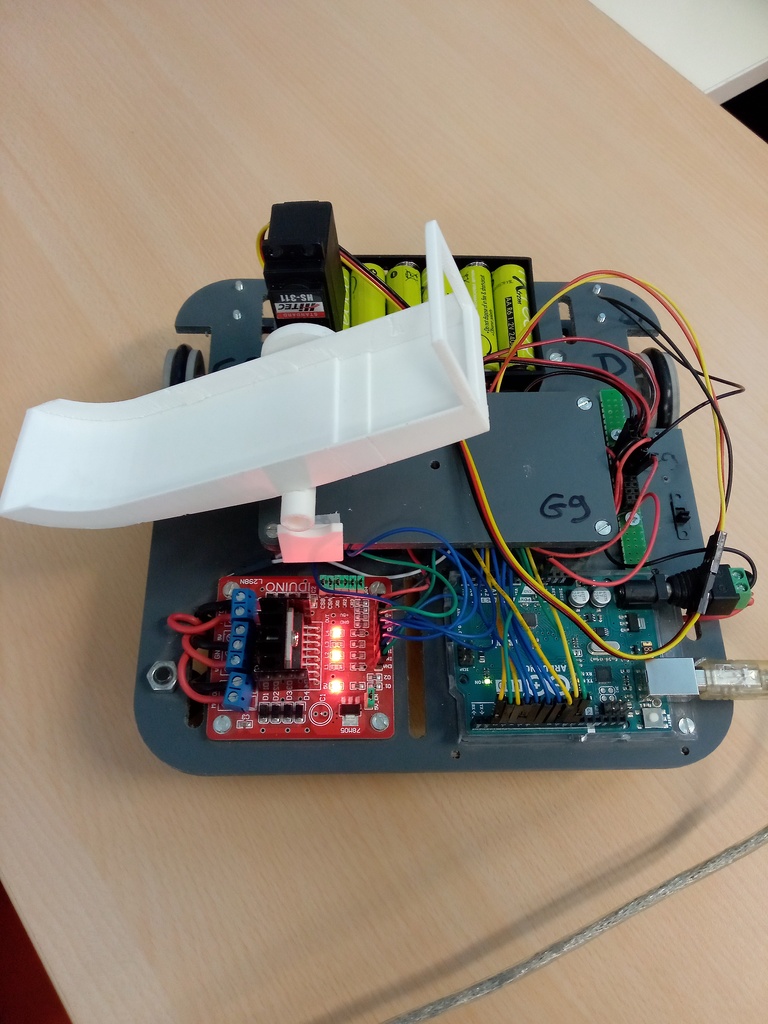
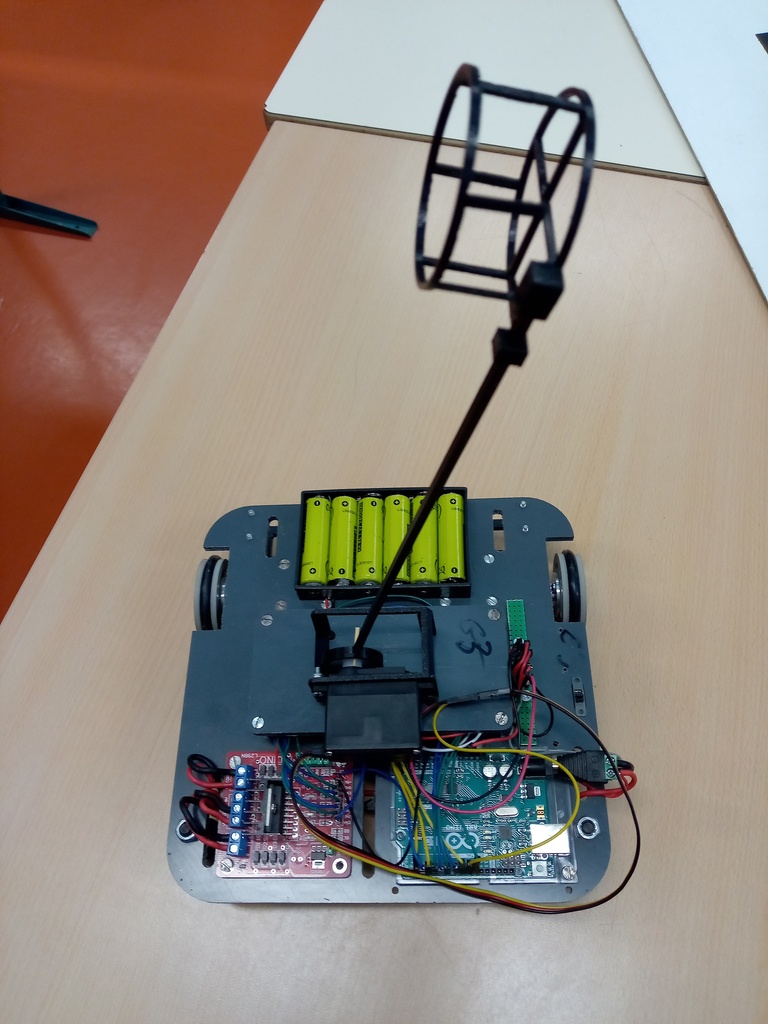
Le robot sera conçu de A à Z (mécanique, électronique) en utilisant des motoréducteurs et des cartes électroniques à microcontrôleur achetés.
Au début de l'année, les élèves ont été formés à la conception mécanique en 3D avec un projet de support de téléphone puis à la programmation en C sur une carte à microcontrôleur.
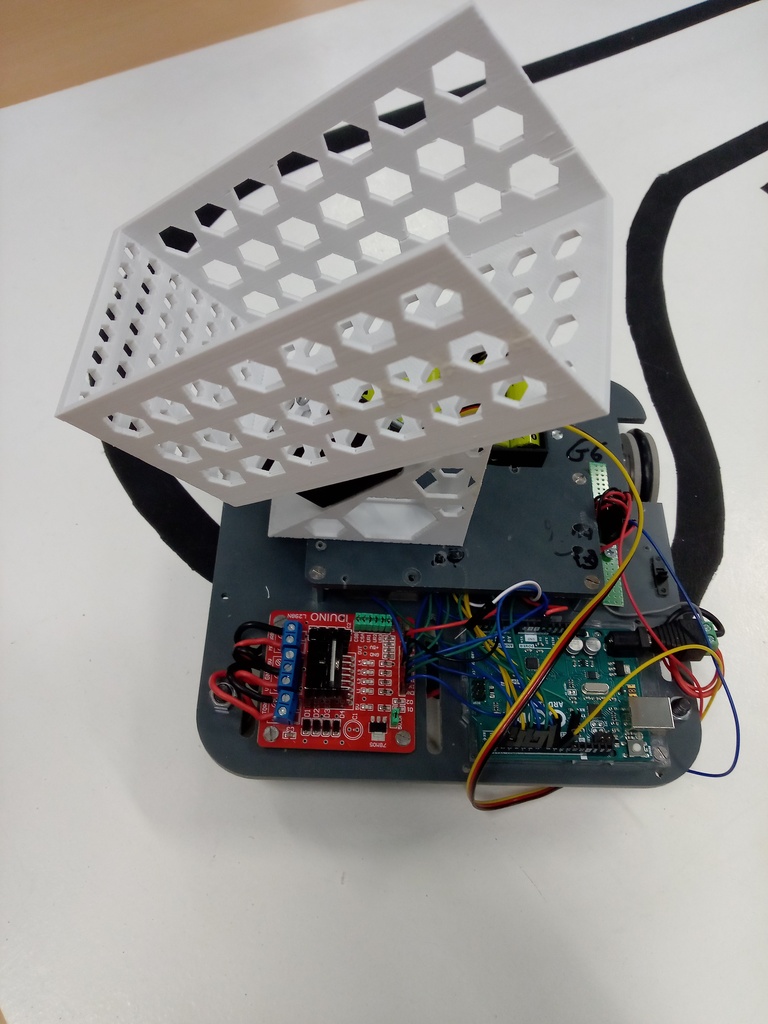
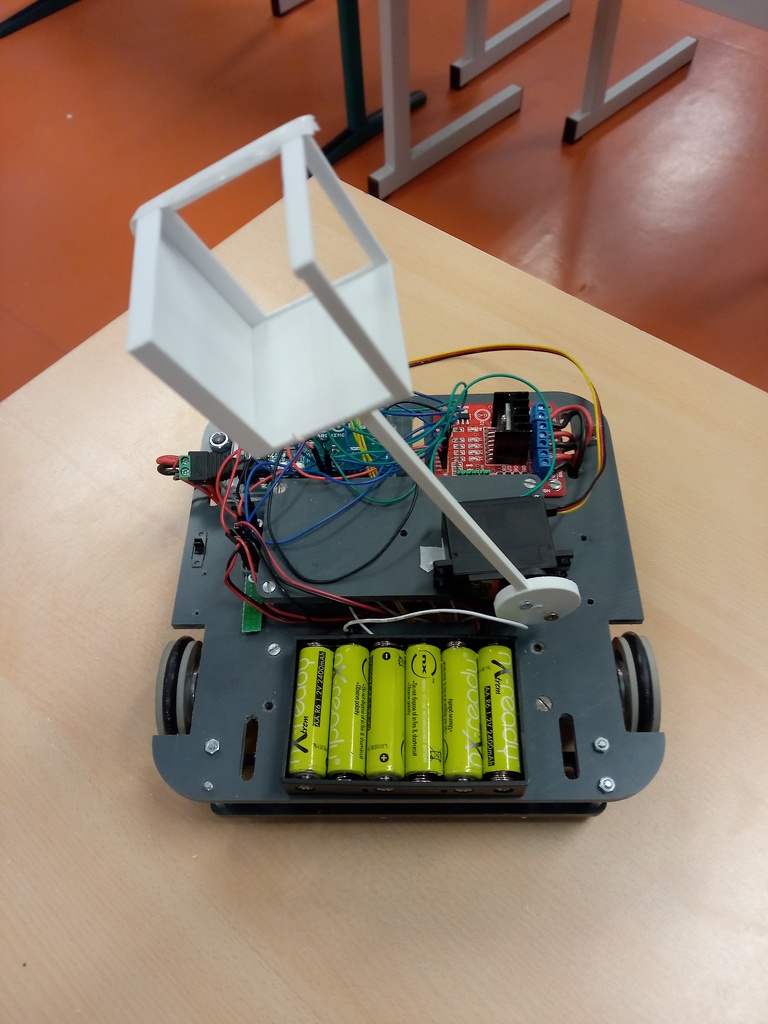
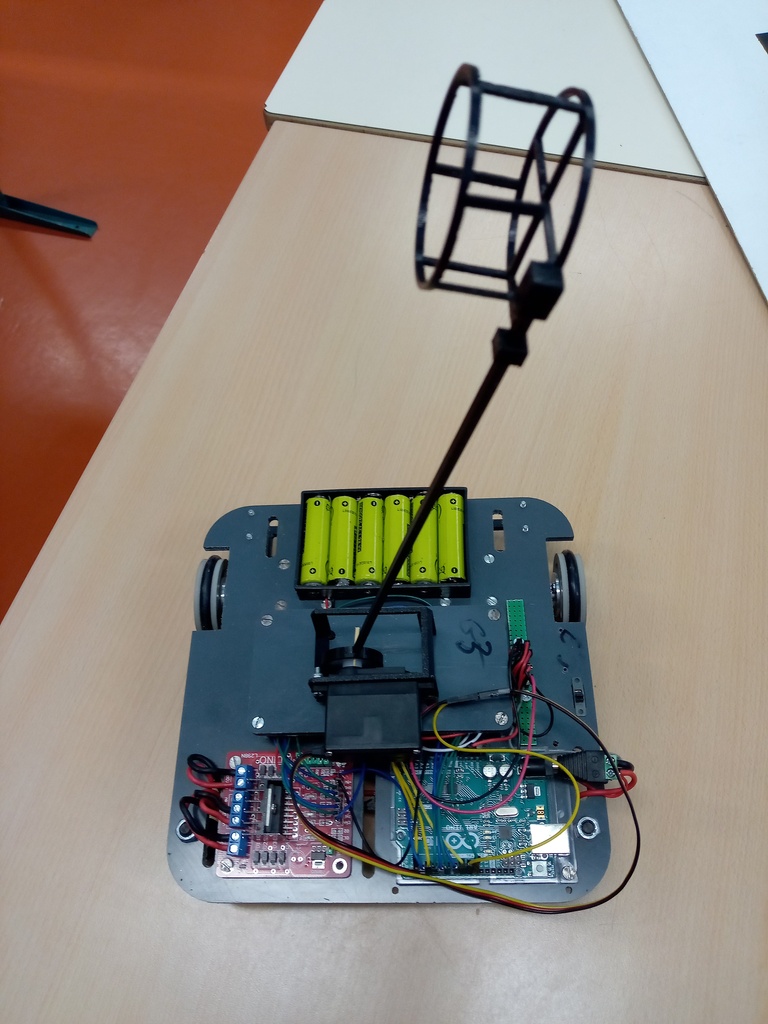
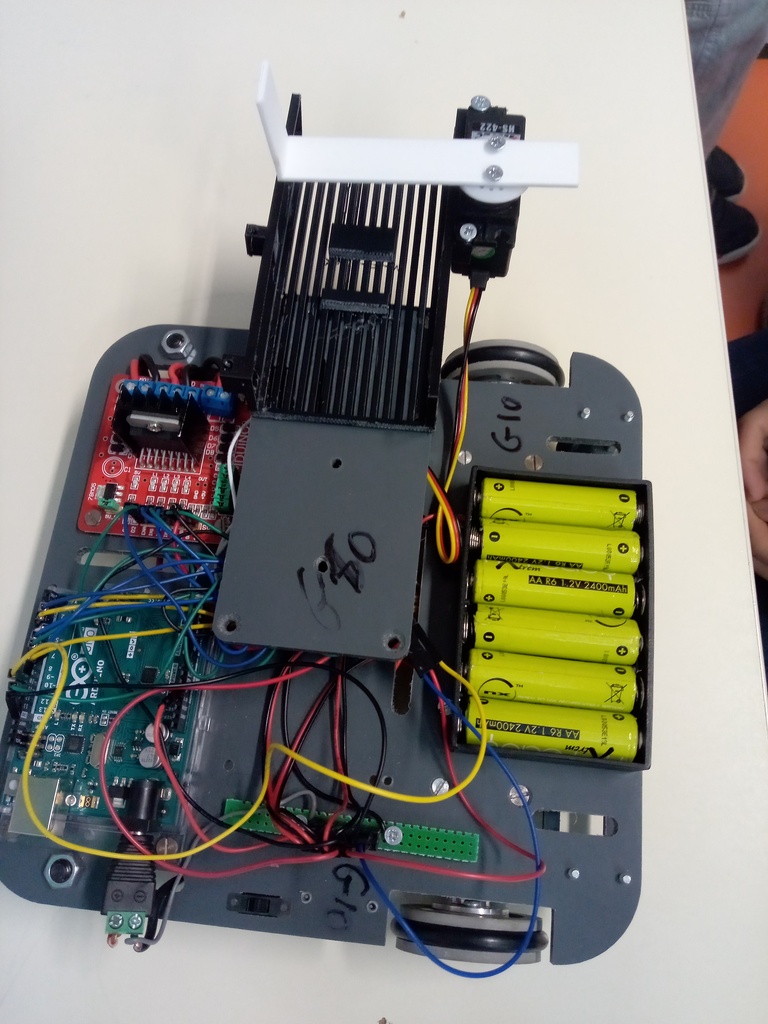
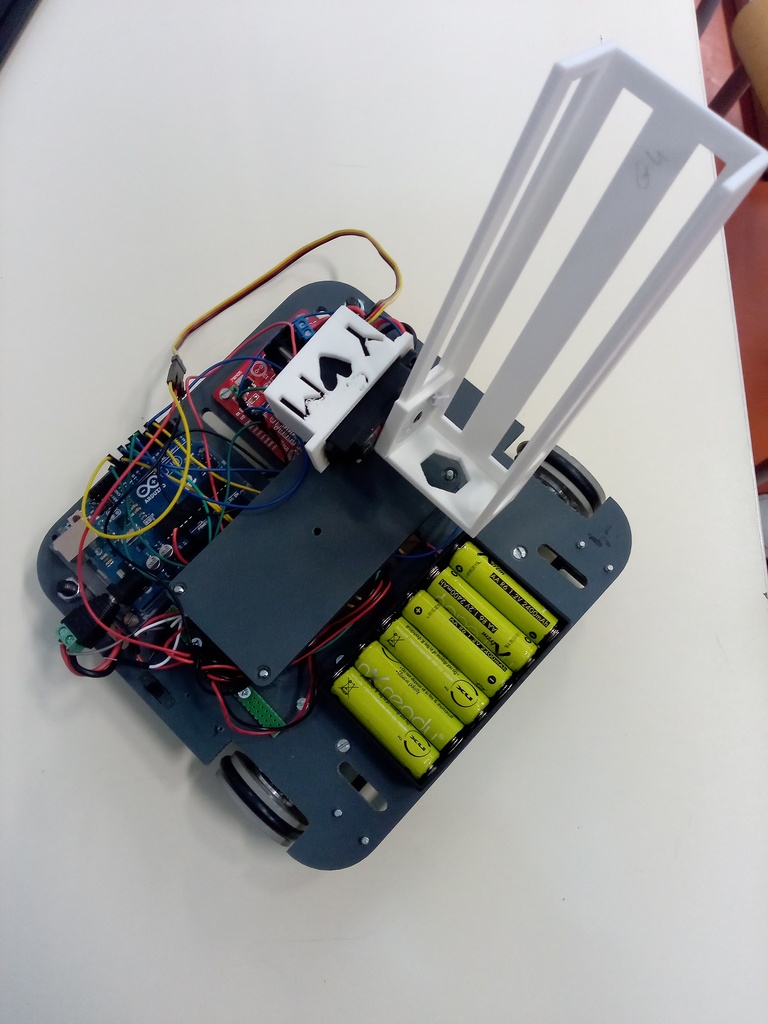
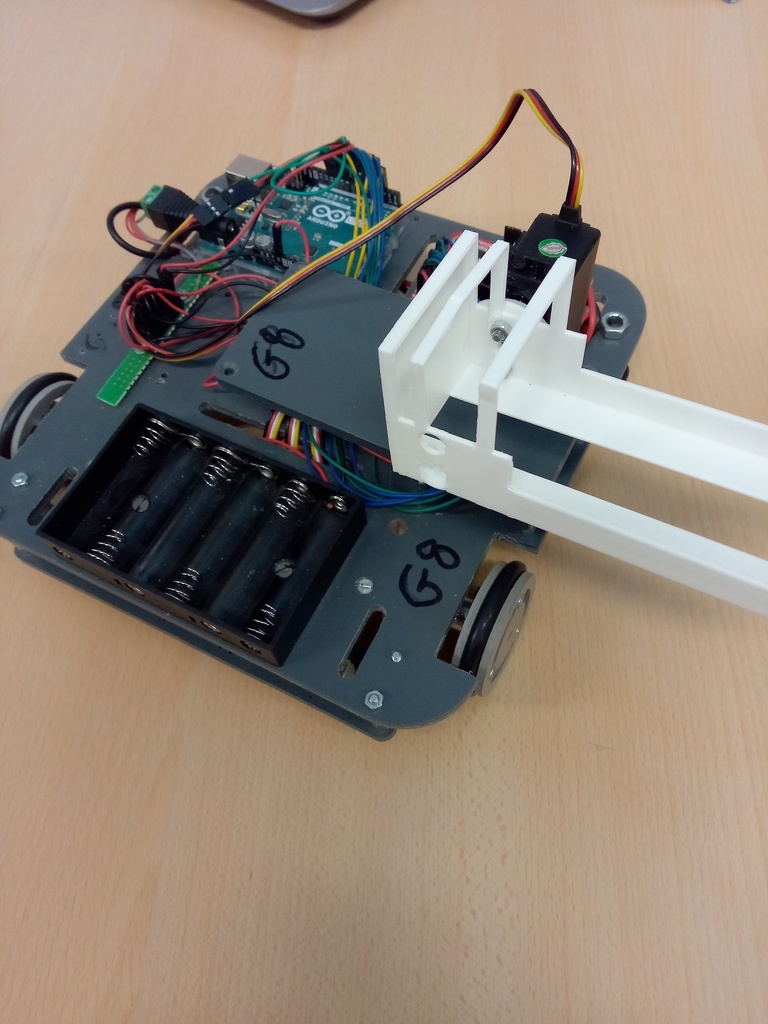
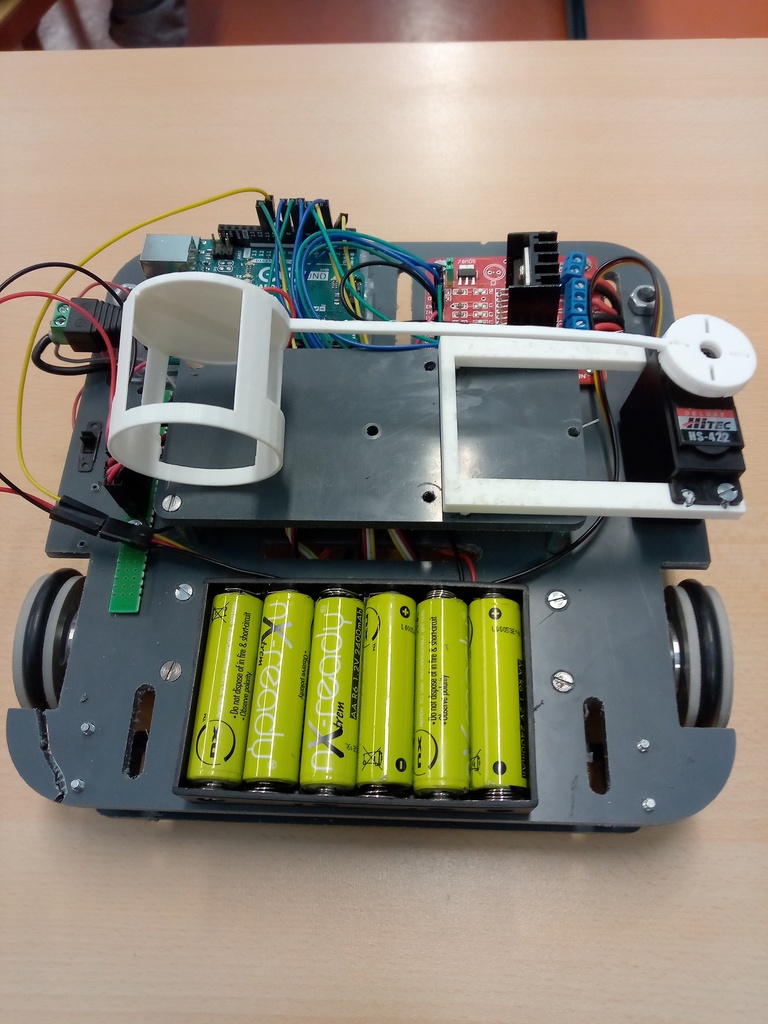
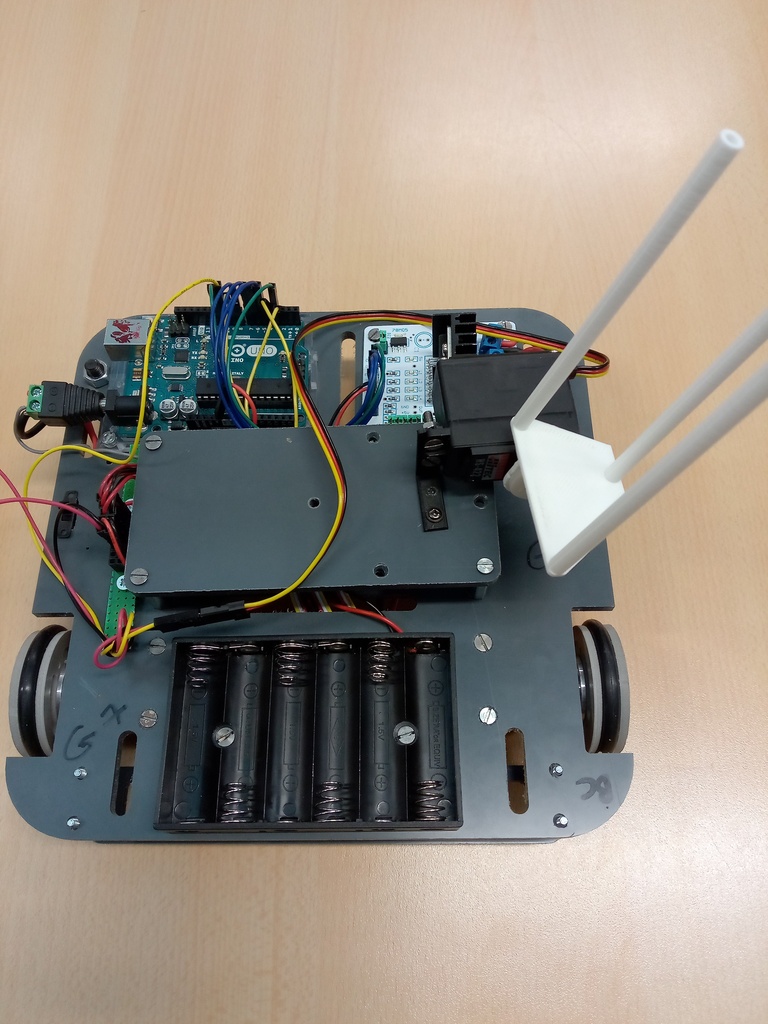
Puis fin décembre, les élèves en équipe ont débuté leur conception de robot et sa programmation. Les impressions à l'imprimante 3D ont permis de faire naître de l'imagination des élèves des systèmes mécaniques pour marquer un panier.
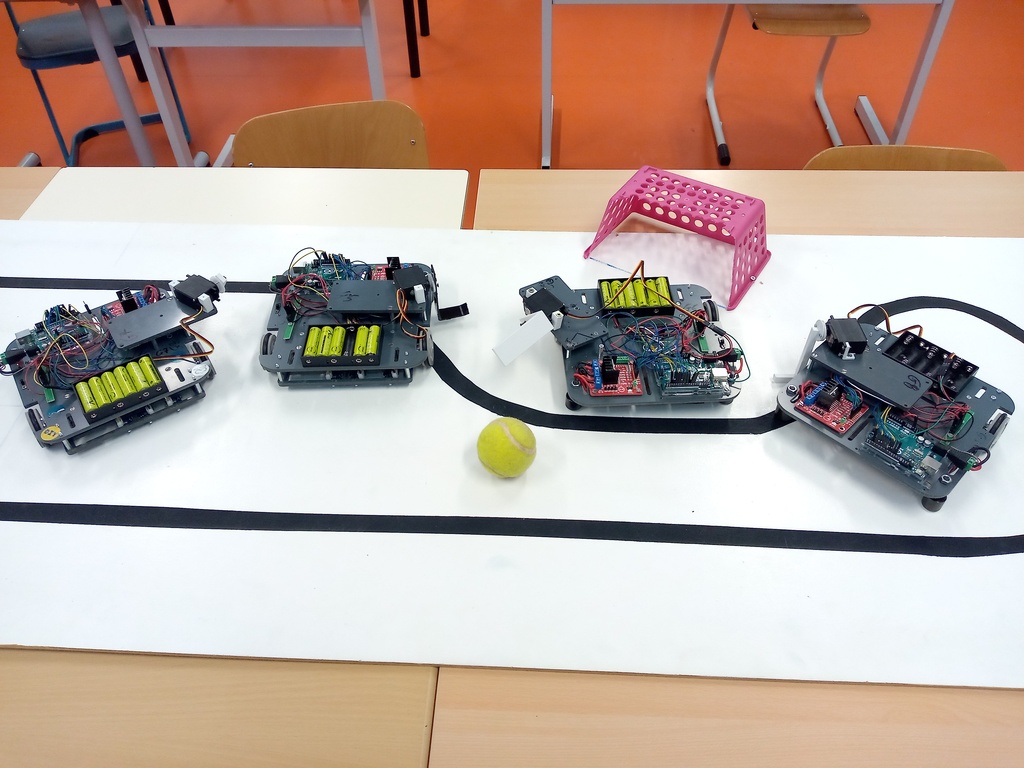
Chaque équipe (9 au total) a pu réaliser de A à Z son propre robot et le tester jusqu'à son bon fonctionnement. Une galerie de photos en fin de cet article permet de visionner leurs différentes réalisations de cette année 2023 ainsi que ceux des années précédentes.
Une compétition a permis de départager les équipes pour la rapidité de leur robot à effectuer le parcours complet de la piste. Plusieurs essais ont été chronométrés, seul le meilleur temps a été retenu.
Un oral de présentation de 5 minutes devant un professeur et la notation de l'innovation du système de balle par un enseignant de l'enseignement Innovation Technologique en STI2D a également permis d'attribuer des points à chaque équipe.
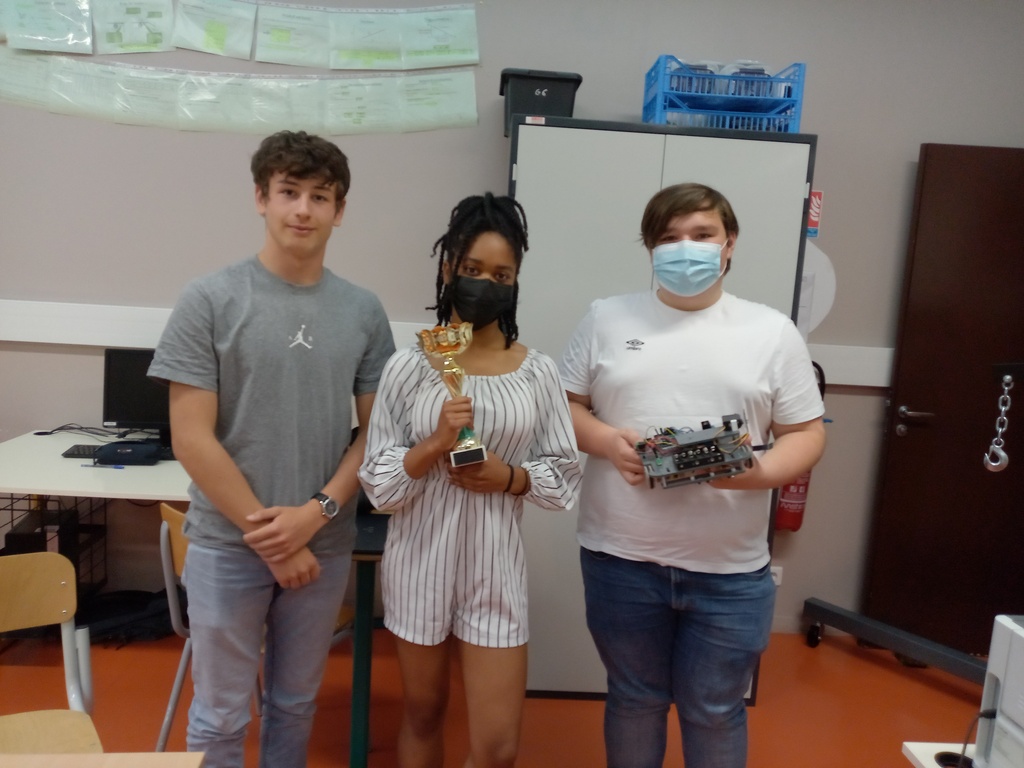
Finalement, c'est l'équipe constituée des élèves (Labbé Liam , Stozyk Kinan , Raluy Sacha , Vivet Yann , Abdessaied Elyoh , Phanthavady Aloon) qui a remporté la coupe cette année avec 17 pts/20.
La remise d'une coupe les a récompensé de leur travail.

En 2022 :
La remise d'une coupe les a récompensé comme on peut le voir sur les photos de la galerie suivante qui regroupe les deux dernières années.